
| >> |
``
Velocity-based robotic assistance for refining motor skill training in a complex target-hitting task using a bio-mimetic trajectory generation model: A pilot study," 
|
| >> |
``
Robot-aided rehabilitation methodology for enhancing movement smoothness by using a human hand trajectory generation model with task-related constraints," 
|
| >> |
``
Analysis of Operational Comfort in Manual Tasks Using Human Force Manipulability Measure," 
|
| >> |
``
Human Muscular Mobility Ellipsoid: End-point Acceleration Manipulability Measure in Fast Motion of Human Upper Arm," 
|
| >> |
``
Vehicle Active Steering Control System Based on Human Impedance Properties of the Arms," 
|
| >> |
``Development of a Mechanical Impedance Model-based Computer Simulator for
Evaluation of an Active Headrest Mechanism in Rear-End Impact," Yoshiyuki TANAKA, Shunsuke FUKUSHIMA, Masaya YAMASHITA, Yoshinobu OOTANI, Toshio TSUJI, Journal of Mechanical Systems for Transportation and Logistics, Vol. 6, No. 1, pp. 73-88, 2013. 
|
| >> |
``Functional Interactions between the Cerebellum and the Premotor Cortex for Error Correction during the Slow Rate Force Production Task: an fMRI Study," Yoshiyuki TANAKA, Naoki FUJIMURA, Toshio TSUJI, Masaharu MARUISHI, Hiroyuki MURANAKA and Tatsuya KASAI, Experimental Brain Research, Vol. 193, No. 1, pp. 143-150, 2009.1.
|
| >> |
``Bio-mimetic Impedance Control of Robotic Manipulator for Dynamic Contact Tasks," |
| >> |
``Simultaneous Learning of Robot Impedance Parameters Using Neural
Networks," Mutsuhiro TERAUCHI, Yoshiyuki TANAKA, Seishiro SAKAGUCHI, Nan BU, and Toshio TSUJI Journal of Robotics and Mechatronics, Vol. 19, No. 1, pp. 106-113, 2007.1. |
| >> |
``Functional demanded excitability changes of human hand motor area," Zhen NI, Makoto TAKAHASHI, Nan LIANG, Yoshiyuki TANAKA, Toshio TSUJI, Susumu YAHAGI, and Tatsuya KASAI, Experimental Brain Research, Vol. 170, pp. 141-148, 2006.11. |
| >> |
``Virtual Driving Simulator for Measuring Dynamic Properties of Human
Arm Movements," Yoshiyuki TANAKA, Ryoma KANDA, Naoki YAMADA, Hitoshi FUKUBA, Ichiro MASAMORI, and Toshio TSUJI, Journal of Robotics and Mechatronics, Vol. 18, No. 2, pp. 177-185, 2006.4. |
| >> |
``Motor strategies and excitability changes of human hand motor area are dependent on different voluntary drives," Zhen NI, Nan LIANG, Makoto TAKAHASHI, Takamasa YAMASHITA, Susumu YAHAGI, Yoshiyuki TANAKA, Toshio TSUJI, and Tatsuya KASAI European Journal of Neuroscience, Vol. 23, Issue 12, pp. 3399-3406, 2006.6. |
| >> |
``LMI Based Neurocontroller for State-Feedback Guaranteed Cost Control
of Discrete-Time Uncertain System," Hiroaki MUKAIDANI, Yasuhisa ISHII, Nan BU, Yoshiyuki TANAKA, Toshio TSUJI, IEICE Transactions on Information and Systems, Vol. E88-D, No.8, pp. 1903-1911, 2005.8. |
| >> |
``Bio-mimetic Trajectory Generation using a Neural Time Base
Generator," Yoshiyuki TANAKA, Toshio TSUJI, Vittorio SANGUINRETI, Pietro G. MORASSO Journal of Robotic Systems, Vol. 22, No. 11, pp. 625-637, 2005.11. |
| >> |
``On-line Learning of Robot Arm Impedance Using Neural Networks," Toshio TSUJI, and Yoshiyuki TANAKA, Robotics and Autonomous Systems, Vol. 52, No. 4, pp. 257-271, 2005.8. |
| >> |
``Tracking Control Properties of Human-robotic Systems Based on
Impedance Control," Toshio TSUJI, and Yoshiyuki TANAKA, IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, Vol. 35, No. 4, pp. 523-535, 2005.7. |
| >> |
``Analysis of Mechanical Impedance in Human Arm Movements using a
Virtual Tennis System," Toshio TSUJI, Yusaku TAKEDA, and Yoshiyuki TANAKA, Biological Cybernetics, Vol. 91, No. 5, pp. 295-305, 2004.10. |
| >> |
``On-line Learning of Virtual Impedance Parameters in Non-contact
Impedance Control Using Neural Networks," Toshio TSUJI, Mutsuhiro TERAUCHI, and Yoshiyuki TANAKA, IEEE Transactions on Systems, Man, and Cybernetics-Part B: Cybernetics, Vol. 34, No. 5, pp. 2112-2118, 2004.10. |
| >> |
``Brain Activation during Manipulation of the Myoelectric Prosthetic
Hand: A Functional Magnetic Resonance Imaging Study," Masaharu MARUISHI, Yoshiyuki TANAKA, Hiroyuki MURANAKA, Toshio TSUJI, Yoshiaki OZAWA, Satoshi IMAIZUMI, Makoto MIYATANI, and Junichiro KAWAHARA, NeuroImage, Vol. 21, No. 4, pp. 1604-1611, 2004.4. |
| >> |
``Measurement of Human Hand Impedance Characteristics Depending on
Dual Arm Configurations," Yusaku TAKEDA, Yoshiyuki TANAKA, and Toshio TSUJI, Journal of Robotics and Mechatronics, Vol. 16, No. 6, pp. 635-642, 2004.4. |
| >> |
``Human Impedance Perception through Sensory-Motor Integration," Toshio TSUJI, Yoshiyuki TANAKA, Tatsuya ABE, Hideki MIYAGUCHI, Journal of Robotic and Mechatronics, Vol. 15, No. 2, pp. 192-199, 2003.4. |
| >> |
``Biomimetic Trajectory Generation Based on Human Movements with a
nonholonomic constraint," Toshio TSUJI, Yoshiyuki TANAKA, Makoto KANEKO. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, Vol. 32, No. 6, pp. 773-779, 2002.11. |
| >> |
``Bio-Mimetic Trajectory Generation of Robots via Artificial Potential Field with Time Base Generator," Toshio TSUJI, Yoshiyuki TANAKA, Pietro G. MORASSO, Vittorio SANGUINETI and Makoto KANEKO, IEEE Transactions on Systems, Man, and Cybernetics-Part C: Applications and Reviews, Vol. 32, No. 4, pp. 426-439, 2002.11. |
| >> |
``A Bio-mimetic Rehabilitation Aid for Reaching Movements using Time
Base Generator," Toshio TSUJI, Yoshiyuki TANAKA, Makoto KANEKO and Hideki MIYAGUCHI, Machine Intelligence and Robotic Control, Vol. 2, No. 4, pp. 141-149, 2000.12. |
| >> |
``Dynamic Control of Redundant Manipulators using the Artificial
Potential Field Approach with Time Scaling," Yoshiyuki TANAKA, Toshio TSUJI and Makoto KANEKO, The Journal of Artificial Life and Robotics, Springer-Verlag, Vol. 3, pp. 79-85, 1999.6. |
| >> |
「ペダル操作時の反力知覚特性の力学的解析と反力設計への応用」, |
| >> |
“ヒトの上肢姿勢維持における手先反力知覚の方向性”, 田中 良幸, 辻敏夫, 日本バーチャルリアリティ学会論文誌, Vol. 16, No. 3, pp. 335-341, 2011.3. |
| >> |
“人間の眼球‐関節運動特性に基づく自動車インテリア・パッケージの解析評価”, 田中 良幸, 楽松武, 堀上正義, 宮崎透, 西川一男, 農沢隆秀, 辻敏夫, 計測自動制御学会論文集, Vol. 46, No. 2, pp. 123-129, 2010.2. |
| >> |
“ステアリング操作における人間の手先インピーダンス特性の解析”, 田中 良幸, 神田龍馬, 武田雄策, 山田直樹, 福庭一志, 正守一郎, 辻敏夫, 計測自動制御学会論文集, Vol. 42, No. 12, pp. 1353-1359, 2006.12. |
| >> |
“上肢運動訓練を目的とした仮想カーリング作業における人間の感覚運動特性”, 田中 良幸, 松下和寛, 辻敏夫, 計測自動制御学会論文集, Vol. 42, No. 12, pp. 1288-1294, 2006.12. |
| >> |
“付加的制御入力を利用した不確定離散時間システムのためのロバスト静的出力フィードバック制御”, 向谷博明, 石井靖久, 坂口誠史郎,田中 良幸, 辻敏夫, 電子情報通信学会和文論文誌分冊A(レター,研究速報), Vol. J89-A, No. 12, pp. 1209-1214, 2006.12. |
| >> |
“機能的MRI環境下で利用可能な筋電制御型バーチャル義手操作システム”, 田中 良幸, 野田聡, 辻敏夫, 丸石正治, 村中博幸, 計測自動制御学会論文集, Vol. 41, No. 2, pp. 612-618, 2005.2. |
| >> |
“プレチスモグラムを利用した血管状態モニタリング”, 坂根彰, 辻敏夫,田中 良幸, 佐伯昇, 河本昌志, 計測自動制御学会論文集, Vol. 40, No. 12, pp. 1236-1242, 2004.12. |
| >> |
“生体関節トルク特性を考慮した下肢操作特性の解析”, 田中 良幸, 山田直樹, 正守一郎, 辻敏夫, 計測自動制御学会論文集, Vol. 40, No. 6, pp. 612-618, 2004.6. |
| >> |
“不確定特異摂動システムのロバストフィルタ設計” 向谷博明,田中 良幸, 水上孝一 機械学会論文集C編 Vol. 69, No. 6, pp. 1571-1578, 2003.6. |
| >> |
“特異摂動システムに関するリカッチ方程式を解くためのニュートン法” 向谷博明,田中 良幸, 水上孝一 電気学会論文誌C,Vol. 123-C, No. 5, pp. 970-977, 2003.5. |
| >> |
“制御ゲイン変動を受ける大規模システムのための 2 次コスト保証制御” 向谷博明, 田中 良幸, 水上孝一 電気学会論文誌C, Vol. 123-C, No. 1, pp. 118-129, 2003.1. |
| >> |
“人間の上肢運動を模擬したロボットの軌道生成法”, 田中 良幸, 辻敏夫, 金子真 日本ロボット学会誌, Vol. 18, No. 5, pp. 699-705, 2000.7. |
| >> |
“時間関数発生器に基づくロボットのオンライン軌道生成”, 田中 良幸, 辻敏夫, 金子真 電気学会論文誌C, Vol. 119-C, No. 10, pp. 1262-1267, 1999.10. |
| >> |
“時間軸変換を組み込んだ人工ポテンシャル法による冗長マニピュレータのフィードバック制御”, 田中 良幸, 辻敏夫, 金子真 電気学会論文誌C, Vol. 119-C, No. 4, pp. 425-431, 1999.4. |
| >> |
``A Robotic Rehabilitation System for Cooperative Motor Training: A Preliminary Study in A Balance Seesaw Task," |
| >> |
``Robotic Hand-Free-Stick for Walking Balance Assistance," |
| >> |
``Scope of Manipulability Sharing: A Case Study for Sports Training," |
| >> |
``Analysis of Haptic Interaction between Limbs in Operations of Vehicular Driving Interfaces," |
| >> |
``A Multiple-Input Single-Output Model for Human Force Perception in Pedaling," Yoshiyuki TANAKA,Shuhei TANABE, 2016 IEEE International Conference on Systems, Man, and Cybernetics, pp. 3411-3416, Budapest, Hungary, Oct. 2016. |
| >> |
``Development of a Robotic Evaluation System for the Ability of Proprioceptive Sensation in Slow Hand Motion," |
| >> |
``Biomechanical and Psychophysical Evaluation of Operating Loads in Vehicular Driving," |
| >> |
``A Study on Design Factors of Gas Pedal Operation," |
| >> |
``Robotic Rehabilitation System Using Human Hand Trajectory Generation Model in Virtual Curling Task," |
| >> |
``A Motor-control Training Method for Smoothness and Timing of Voluntary Arm Movements in a Virtual Tennis Task," |
| >> |
``Active-Steering Control System Based on Human Hand Impedance Properties," |
| >> |
``A Force Estimation Method Based on Deformation of An Object Using A Hight-Speed Camera," |
| >> |
``Development of An Evaluation Tool for A Driving Seat Reducing Neck Injury Based on Mechanical Impedance," |
| >> |
``Analysis of Human Hand Impedance Properties Depending on Driving Conditions," |
| >> |
``Mechanical and Perceptual Analyses of Human Foot Movements in Pedal Operation," Yoshiyuki TANAKA, Hidekazu KANEYUKI, Toshio TSUJI, Tooru MIYAZAKI, Kazuo NISHIKAWA, and Takahide NOUZAWA, Proc. of the 2009 IEEE International Conference on Systems, Man, and Cybernetics, pp. 1736-1741, San antonio, U.S.A., 2009.10. |
| >> |
Hiroaki MUKAIDANI, Takayoshi UMEDA, Yoshiyuki TANAKA, and
Toshio TSUJI |
| >> |
``Development of a Training-Assist Robotic System Adapting to Individual Motor Abilities in Virtual Tennis Task," Masataka ISHII, Yoshiyuki TANAKA, Toshio TSUJI and Nobuaki IMAMURA, Proc. of the 4th International Workshop on Computational Intelligence and Applications 2008 (IWCIA 2008), pp. 179-184, Hiroshima, Japan, 2008.12. |
| >> |
``Directional Properties of Human Hand Force Perception in the Maintenance of Arm Posture," |
| >> |
``Modeling and Evaluation of Human Motor Skills in a Virtual Tennis Task," |
| >> |
``LMI-Based Additive Gain for Guaranteed Cost Control of Robotic Manipulator with Deadzone," |
| >> |
``Human Hand Movements in Skilled Motor Performance of a Virtual Curling Task," |
| >> |
``Analysis and Modeling of Human Impedance Properties for Designing a Human-Machine Control System," |
| >> |
``Neural-Based Decentralized Robust Control of Large-Scale Uncertain Nonlinear Systems with Guaranteed H_inf Performance," |
| >> |
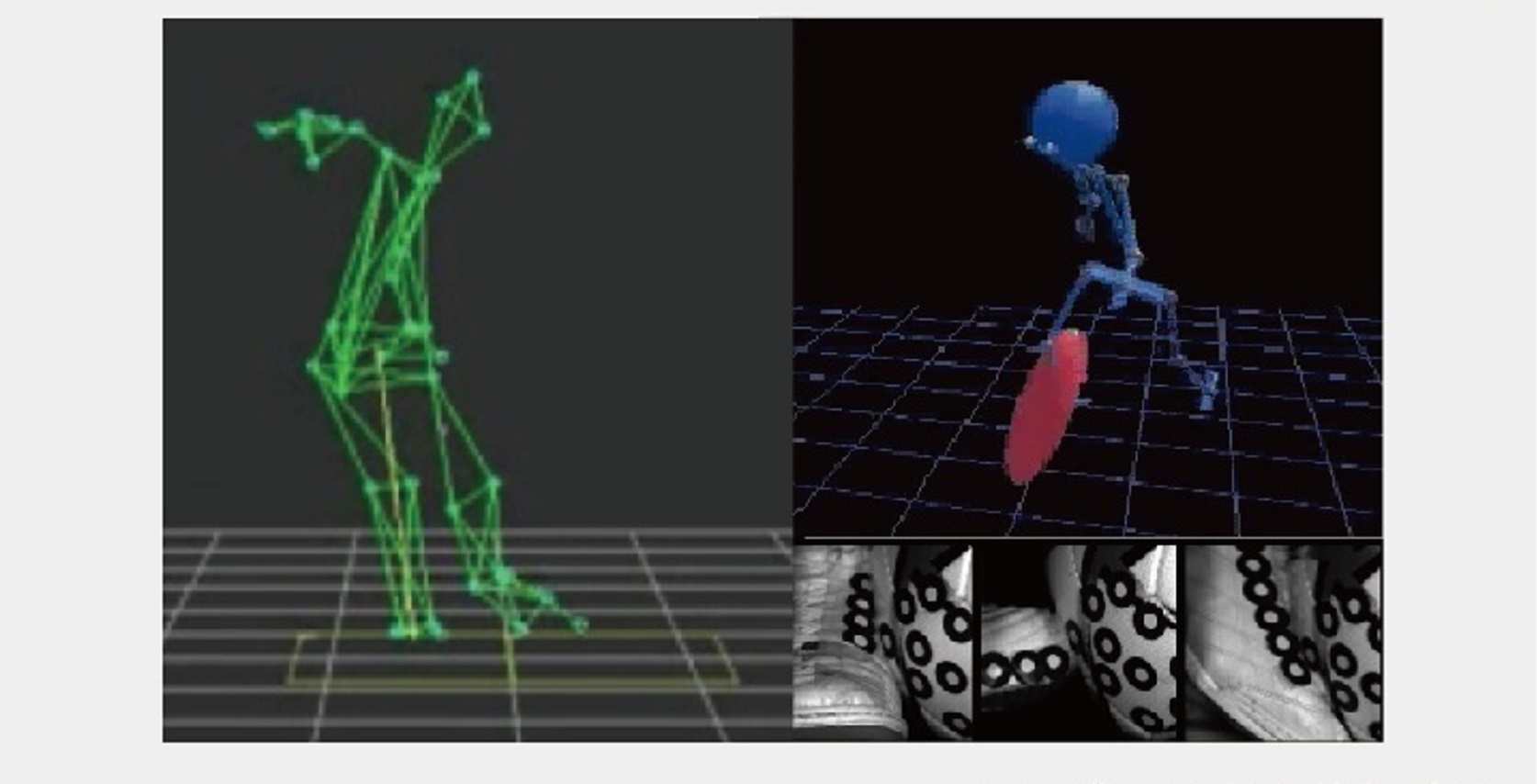
``Manipulability Analysis of Kicking Motion in Soccer Based on Human Physical Properties," |
| >> |
``LMI-Based Neurocontroller for Guaranteed Cost Control of Uncertain Servo System," |
| >> |
``Manipulability Analysis of Human Arm Movements during the Operation of a Variable-Impedance Controlled Robot," |
| >> |
``Analysis of Human Perception Ability for Robot Impedance," |
| >> |
``Motion Dependence of Impedance Perception Ability in Human Movements," |
| >> |
``Analysis of Human Hand Impedance Regulation Ability," |
| >> |
``LMI Based Neurocontroller for Guaranteed Cost Control of Discrete-Time Uncertain System," |
| >> |
``A Virtual Prosthetic Hand Using EMG Signals for fMRI Measurements," |
| >> |
``On-line Learning of Robot Arm Impedance Using Neural Networks," |
| >> |
``A Neck Injury Analyzer Tool Based on Mechanical Impedance," |
| >> |
``Realtime Monitoring of Vascular Conditions Using a Probabilistic Neural Network," |
| >> |
``LMI Based Neurocontroller for Output-Feedback Guaranteed Cost Control of Discrete-Time Uncertain System," |
| >> |
``Manipulability Analysis of Lower Extremities Based on Human Joint-Torque Characteristics," |
| >> |
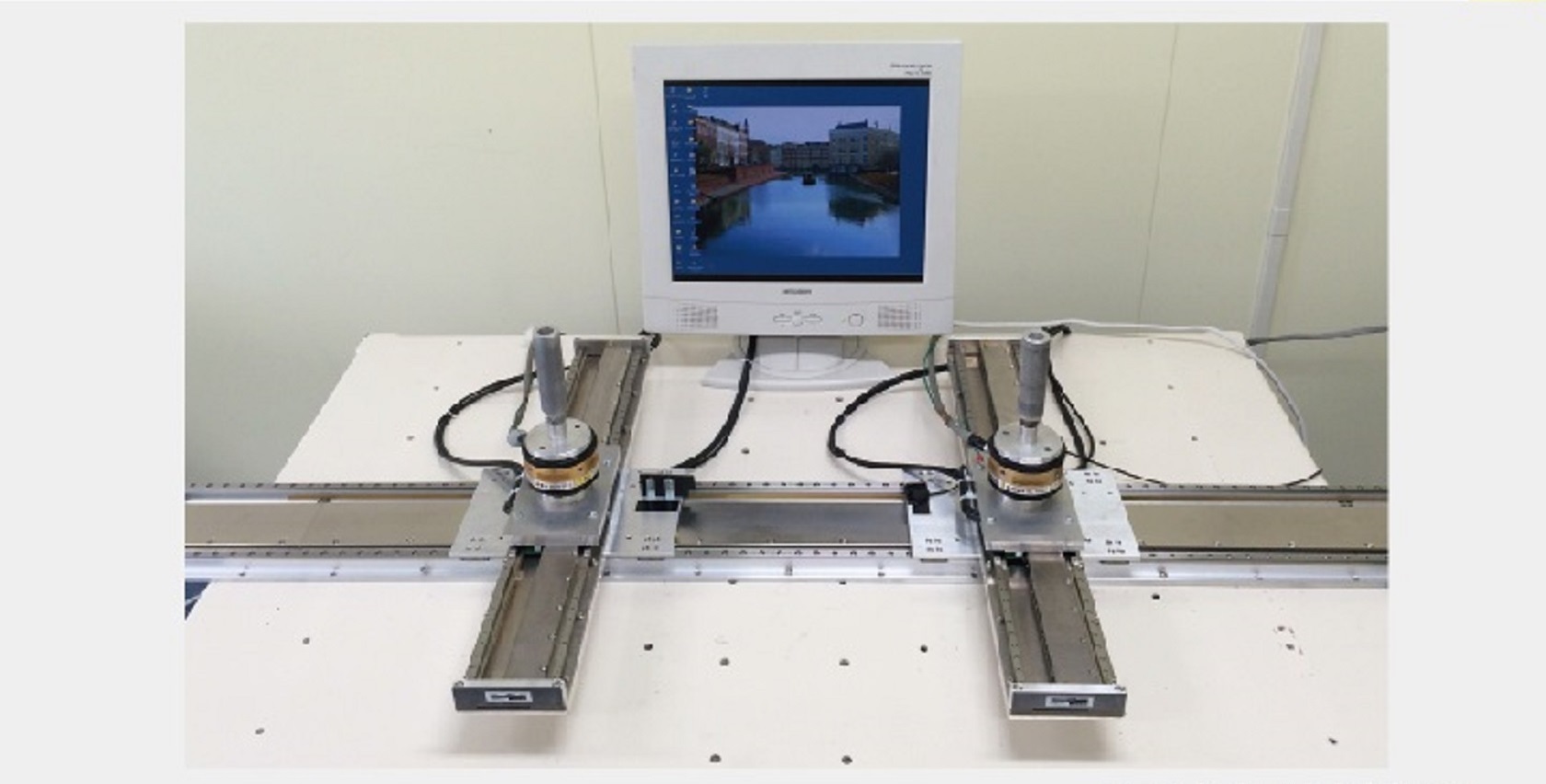
``Impedance Simulator: Analysis of Human Hand Impedance Characteristics," |
| >> |
``Development of a Diagnosis Support System on Vascular Conditions Using a Probabilistic Neural Network," |
| >> |
``Task Readiness Impedance in Human Arm Movements for Virtual Ball-Catching Task," |
| >> |
``A Virtual Training Sports System for Measuring Human Hand Impedance," |
| >> |
``Estimating Arterial Wall Impedance using a Plethysmogram," |
| >> |
``Sub-Optimal Kalman Filter for Multimodeling Systems," |
| >> |
``An LMI approach to guaranteed cost control of nonlinear large-scale uncertain delay systems under controller gain
perturbations," Hiroaki MUKAIDANI, Yasuhiro KAWATA, Yoshiyuki TANAKA and Hua XU, Proc. of the 3rd International DCDIS Conference on Engineering Applications and Computational Algorithms, pp. 40-45, Ontario, Canada, 2003.5. |
| >> |
``The Guaranteed Cost Control for Uncertain Large-Scale Interconnected Systems," |
| >> |
``On-line Learning of Virtual Impedance Parameters in Non-contact Impedance Control Using Neural Networks," |
| >> |
``A Virtual Air Hockey System for Skill Training," |
| >> |
``Tracking Control Properties of Human-robot Systems," |
| >> |
``A Bio-mimetic Rehabilitation Aid for Motor Control Training using Time Base Generator," |
| >> |
``A Bio-mimetic Rehabilitation Aid for Human Movements using Mechatronic Technology," |
| >> |
``Bio-mimetic Trajectory Generation of Robots using Time Base Generator," |
| >> |
``Trajectory Generation using Time Scaled Artificial Potential Field," |
| >> |
``Trajectory Formation of Human Arm with Nonholonomic Constraints," |
| >> |
``Dynamic Control of Redundant Manipulators Using Artificial Potential Field Approach with Time Scaling," |
| >> |
``Scale-dependent Grasp -A case study-," |
| >> |
`` Robust Static and Dynamic Output Feedback Suboptimal Control of Uncertain Discrete-Time Systems Using Additive," Hiroaki MUKAIDANI, Yasuhisa ISHII, Yoshiyuki TANAKA and Toshio TSUJI, Optimization Theory, Nova Science Publishers, Inc. pp.387-406, 2011.4. |
| >> |
``Cortical Network of Auditory Feedback on Hand Action: a functional MRI Study," |
| >> |
``Myoelectric Teleoperation of a Dual-arm Manipulator Using Neural Networks," |
| >> |
``上肢運動インピーダンスを組み込んだステアリング制御系", |
| >> |
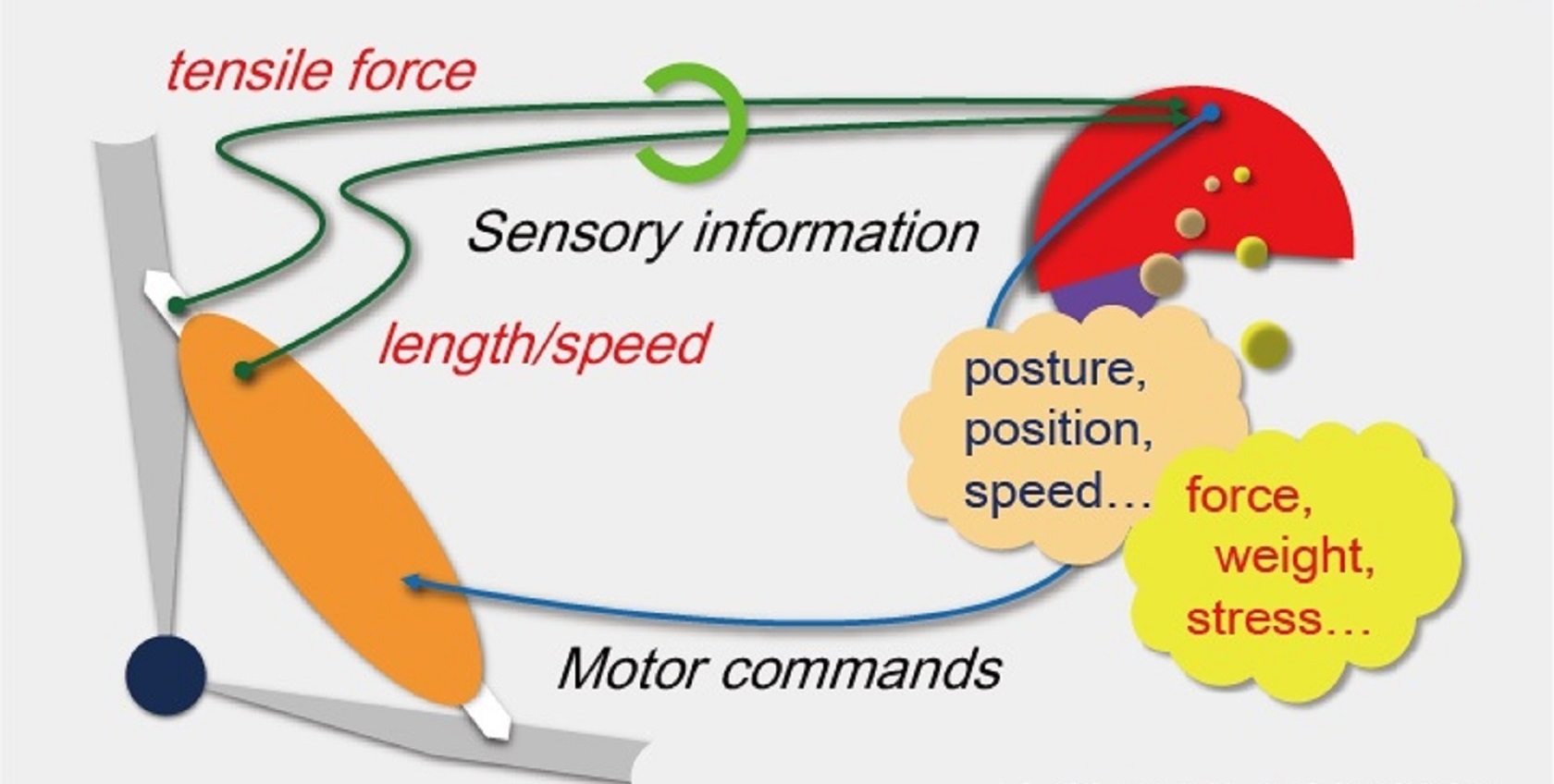
“生体インピーダンス特性のシステム・インテグレーションを目指して”, |
| >> |
“リハビリテーション・ロボティクス-上肢運動訓練ロボットの紹介-”, |
| >> |
``Toward Further Innovation in Human-Machine Systems," Yoshiyuki TANAKA, 2016 IEEE 9th International Workshop on Computational Intelligence and Applications, Hiroshima, Japan, Nov. 5, 2016. |
| >> |
田中 良幸,「筋感覚・運動特性の数理モデル化と医工実応用を見据えて」,ヒューマンセントリックロボティクス研究専門委員会 ,2014年1月9日(福岡). |
| >> |
田中 良幸,CREST EMS RTPチームセミナー,2013年11月19日(京都). |
| >> |
田中 良幸,「上肢運動インピーダンス特性を考慮したステアリング制御系の操作性評価」, 自動車技術会第7回アクティブセイフティ部門委員会, 2009.7(東京). |
| >> |
“VRシステムを用いた身体可操作性スコープの開発”,田中 良幸,青山 忠義,塩川 満久,JSMEロボメカ部門 Robomech2019,1A1-Q01 (2019.06). |
| >> |
“ボール転がしタスクによる協働型上肢運動訓練支援システムの開発”,和田 将太,田中 良幸,日本機械学会九州支部第50回学生員卒業研究発表講演会, 902 (2019.3). |
| >> |
“双腕による回転運動における反力知覚特性の力学的解析”,秀島 悠記,田中 良幸,第27回MAGDAコンファレンス,pp. 122-125 (2018.10). |
| >> |
“双脚型ハンドフリー・ステッキのプロトタイプ開発”,竹中 貴澄,小山 尚貴,田中 良幸,JSMEロボメカ部門 Robomech2018,1P1-C13 (2018.06). |
| >> |
“自動車運転における手足の運動特性と知覚特性の簡易解析評価システム”,田中 良幸,上田 康博,下山 英晃,JSMEロボメカ部門 Robomech2018,P2P-L18 (2018.06). |
| >> |
“自動車操縦反力に対する上下肢の反力知覚特性の解析評価”,下山 英晃,上田 康博,田中 良幸,JSME九州支部第71回総会・講演会,H24 (2018.03). |
| >> |
“ヒトのステアリング操舵における機械インピーダンス特性の簡易評価システムの開発”,岡山 航,下山 英晃,上田 康博,田中 良幸,第36回SICE九州支部学術講演会,203A5, pp. 189-192 (2017.11). |
| >> |
“ブーツ型ハンドフリー・ステッキのプロトタイプ開発”,小山 尚貴,竹中 貴澄,田中 良幸,第36回SICE九州支部学術講演会,203B4, pp. 203-206 (2017.11). |
| >> |
“ステアリング操舵における人間特性の簡易推定システムの開発”,上田 康博,下山 英晃,第36回SICE九州支部学術講演会・学生交流発表会,105A09
(2017.11). |
| >> |
“双脚型ハンドフリーステッキの開発”,竹中 貴澄,第35回SICE九州支部学術講演会・学生交流発表会,105A10 (2017.11). |
| >> |
“ウェアラブル可操作性スコープの開発”,明石 浩輝,第36回SICE九州支部学術講演会・学生交流発表会,105A11 (2017.11). |
| >> |
“スポーツ動作時の身体可変構造を考慮した可操作性スコープ”,田中 良幸,青山 忠義,塩川 満久,第35回日本ロボット学会学術講演会,3F3-03(2017.9) |
| >> |
“生体運動制御モデルを用いた自動車操縦インタフェースに関する研究”,岡山 航,山本 将悟,第35回SICE九州支部学術講演会・学生交流発表会,105A11 (2016.11). (最優秀発表賞) |
| >> |
“ZMP理論に基づくハンドフリーステッキの研究開発”,小山 尚貴,國武 聖登,第35回SICE九州支部学術講演会・学生交流発表会,105A12 (2016.11). (優秀発表賞) |
| >> |
“上肢運動制御メカニズムに関する基礎研究と応用”,秀島 悠記,藤田 漱一郎,第35回SICE九州支部学術講演会・学生交流発表会,105A10 (2016.11). |
| >> |
“可操作性楕円体を活用した共有型スポーツ動作解析支援システム”,相川 雄希,濱畑 聡,第35回SICE九州支部学術講演会・学生交流発表会,105A13 (2016.11). |
| >> |
“筋感覚特性を考慮したペダル制御系の操作性評価”,田中 良幸,田邉 周平,自動車技術会2016年秋季大会,No. 99
(2016.10). |
| >> |
“ステアリング操舵における反力知覚特性と左右手先力の解析評価”,古賀 勇雅,岡野 任記,田邊 周平,田中 良幸,日本機械学会ロボティクス・メカトロニクス講演会2016,2P2-07a6 (2016.6). |
| >> |
“ZMP 理論に基づくハンドフリー・ステッキのプロトタイプ開発”,稲尾 祐紀,野田 啓太,田中 良幸,日本機械学会ロボティクス・メカトロニクス講演会2016,A2-14a4 (2016.6). |
| >> |
“協働型タスクによる上肢運動訓練支援システムの開発”,後藤 隆磨,川口 智大,田中 良幸,日本機械学会ロボティクス・メカトロニクス講演会2016,1P1-02a6 (2016.6) |
| >> |
“操縦姿勢による筋感覚特性の定量化と力学的解析”,佐藤 彰剛,川口 智大,田中 良幸,日本機械学会ロボティクス・メカトロニクス講演会2016,1A1-03a3 (2016.6). |
| >> |
“自動車操縦タスクにおけるドライバーの筋骨格系に関する感覚・運動特性の解析評価と応用”,田邉 周平,古賀 勇雅,田中 良幸,自動車技術会2015秋季大会産学ポスターセッション ~シーズとニーズの出会い~ (2015.10). |
| >> |
“物体把持タスクにおける上肢到達運動軌道の力学的解析”,林 優佑,田中 良幸,日本機械学会九州支部長崎講演会2015講演論文集,G13 (2015.9). |
| >> |
“自動車ペダル操縦インタフェース装置を用いた下肢の反力知覚特性の解析評価”,田邉 周平,古賀 勇雅,岡野 任記,田中 良幸,日本機械学会九州支部長崎講演会2015講演論文集,G02 (2015.9). |
| >> |
“可操作性理論に基づく共有型スポーツ身体動作解析システム”,相川 雄希,青山 忠義,塩川 満久,田中 良幸,日本機械学会ロボティクス・メカトロニクス講演会2015,1P2-H10 (2015.5). |
| >> |
“自動車操縦インタフェース操作時の人間特性計測”,岡野 任記,田邉 周平,田中 良幸,日本機械学会ロボティクス・メカトロニクス講演会2015,1A1-G04 (2015.5). |
| >> |
“双腕動作における感覚・運動特性の解析評価”,川口 智大,田中 良幸,日本機械学会ロボティクス・メカトロニクス講演会2015,1P2-I01 (2015.5). |
| >> |
“ZMP 理論に基づくハンドフリー・ステッキ機構”,野田 啓太,田中 良幸,日本機械学会ロボティクス・メカトロニクス講演会2015,1A1-P09 (2015.5). |
| >> |
“双腕動作による感覚・運動訓練支援システムの開発”,川口 智大,田中 良幸,機械学会九州学生会第46回卒業研究発表会, G43
(2015.3). |
| >> |
“自動車操縦系に関する研究ドライビングシュミレータによるステアリング操作時の人間特性測定”,岡野 任記,田邉 周平,田中 良幸,機械学会九州学生会第46回卒業研究発表会, G42 (2015.3). |
| >> |
“呼吸機能強化支援システムの開発”,岩下 裕介,田中 良幸,機械学会九州学生会第46回卒業研究発表会, G32 (2015.3). |
| >> |
“筋感覚診断支援システムの開発”,溝江 元気,田中 良幸,機械学会九州学生会第46回卒業研究発表会, G31 (2015.3). |
| >> |
“下肢姿勢に対するペダル操作時の反力知覚特性のモデリング”,田邉 周平,岡野 任記,田中
良幸,計測自動制御学会システム・情報部門学術講演会2014講演論文集,pp. 205-206 (2014.11). |
| >> |
“双腕による物体操りタスクにおける操縦スキルの力学的解析”,林 優佑,田中 良幸,機械学会九州学生会第45回卒業研究発表会, A105
(2014.3). |
| >> |
“筋感覚・運動特性のモデリングとマン・マシンシステムへのインテグレーション”,松永悠聖,山地弘譜,林
優佑,第32回計測自動制御学会九州支部学術講演会(第11回学生交流会), 5A4 (2013.12). |
| >> |
“生体感覚・運動特性を組み込んだ自動車操縦システム”,山地 弘譜,田中
良幸,計測自動制御学会システム・情報部門学術講演会2013講演論文集, pp.841-842 (2013.11). |
| >> |
“随意運動制御メカニズムに基づく感覚運動機能の評価訓練支援システム”,松永 悠聖,田中
良幸,計測自動制御学会システム・情報部門学術講演会2013講演論文集, pp.188-189 (2013.11). |
| >> |
“筋感覚測定評価装置” 日本国特許出願 2015-164304,特許公開2017-038893,特許6628275 |
| >> |
“印加力推定装置及び方法” 日本国特許出願 2008-230353,特許公開2010-066028,特許5288375 |
| >> |
“知覚特性測定システム” 日本国特許出願 2006-309977,特許公開2008-125520,特許4923256 |